In immer mehr industriellen Anwendungen, aber auch in Verkehr und Haushalt, operieren Roboter und Menschen in einer gemeinsamen Umgebung ohne eine Trennung durch Käfige oder Lichtschranken. Dafür müssen die Systeme funktional sicher (safe) entworfen werden: Es werden zusätzliche Software und sensorische Funktionen benötigt um Kollisionen mit menschlichen Mitarbeitern/innen auszuschließen. Diese Funktionen müssen auch im Falle des Ausfalls oder von Fehlern in der Hardware immer einen sichereren Zustand garantieren, wodurch es nötig wird, zusätzliche Safety-Mechanismen einzufügen. Dies schlägt sich in hohen Entwurfskosten nieder. SAF4I erforscht nun neue Methoden für den automatischen Einbau von Safety-Mechanismen in die Software von Industrie 4.0 Anwendungen, um diese Entwurfskosten signifikant zu reduzieren.
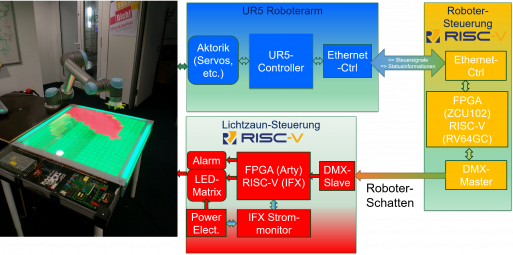
Hierbei wurde an einer kooperativen Mensch-Roboter Arbeitsumgebung, der hohe Automatisierungsgrad der SAFE4I Methodik gezeigt. Gemeinsam erstellen ein menschliche/r Mitarbeiter/in und der Roboterarm eine Skizze. Eine Farbbeleuchtung der Arbeitsplatte (Lichtzaun) warnt den/die Benutzer/in, sobald der Roboterarm einen bestimmten Bereich der Arbeitsfläche nutzen will. Dadurch kann der/die Benutzer/in frühzeitig einer Kollision ausweichen und einen Notstopp des Robotersystems vermeiden. Dies wird in dem folgenden Video anschaulich gezeigt.
Das dazu benötigte Hardware/Software System auf Basis der neunen RISC-V Prozessorarchitektur sowie die benötigten Safety-Mechanismen wurden zu großen Teilen über modell-basierte Automatisierungswerkzeuge generiert, was eine manuelle Implementierung unnötig macht und weitaus weniger fehleranfällig ist. Der erwartete Gewinn an Produktivität so einer Vorgehensweise konnte in der 1. Phase des SAFE4I Projekts demonstriert werden. In der 2. Phase des Projekts werden diese Generierungs-Werkzeuge für die industrielle Anwendung weiterentwickelt und verfeinert.
![]()